EMG-Controlled Wheelchair
Introduction
The EMG-Controlled Wheelchair is a smart mobility solution designed for individuals with mobility impairments. It utilizes electromyography (EMG) signals to control the movement of the wheelchair, allowing users to navigate their surroundings using muscle activity.
Objective
The primary objective of this project is to develop a hands-free wheelchair system that provides independence to users by detecting muscle signals and translating them into motion commands.
Components Used
- EMG Sensor
- Touch screen
- Arduino Mega
- Motor Driver (L298N)
- 12V DC Motors
- Rechargeable Battery
- Joystick (for calibration and backup control)
- LCD Display (16x4)
- Bluetooth Module (HC-05) (optional for wireless control)
Working Principle
The EMG sensor captures electrical activity from muscles, which is then processed by the Arduino Mega. Based on the signal intensity and predefined thresholds, the Arduino controls the motor driver to move the wheelchair in the desired direction.
Implementation
- EMG sensor detects muscle signals.
- Signals are amplified and filtered for noise reduction.
- Arduino processes the signals and maps them to movement commands.
- The motor driver controls the motors accordingly.
- An LCD displays real-time status updates.
Features
- Hands-free control using muscle signals
- Backup joystick control for safety
- LCD display for real-time feedback
- Rechargeable battery for mobility
- Adjustable EMG sensitivity
Advantages
- Increased independence for users
- Non-invasive muscle signal detection
- Customizable control settings
- Cost-effective compared to commercial solutions
Challenges
- Signal noise interference
- Calibration for different muscle strengths
- Battery efficiency optimization
Conclusion
The EMG-Controlled Wheelchair is an innovative solution that enhances mobility for disabled individuals. With further improvements in signal processing and AI integration, this technology can be further refined for better accuracy and usability.
Future Scope
- Integration with AI for better signal processing
- Wireless control through smartphone apps
- Improved battery management system
- Voice-controlled assistance
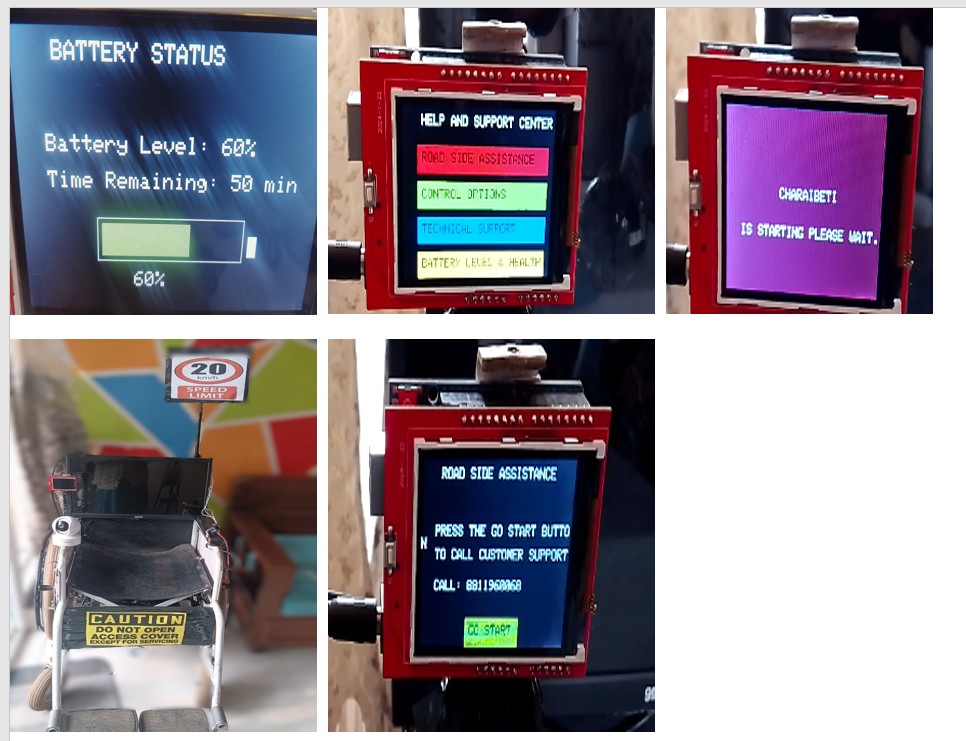
Project Images
 Back to Home
Back to Home

